DSC-27-10-10 System Description
从设计上来讲,与A320没有本质的区别。最大的不同就是一些操纵面增加了电动备份:EHA 和EBHA
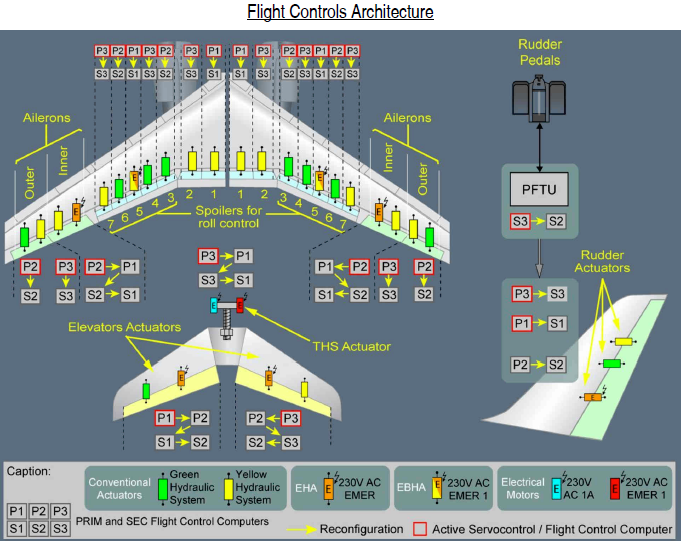
总体结构图熟悉一下就行了,不用都记住,也记不住……扰流板3-7可用于滚转控制。
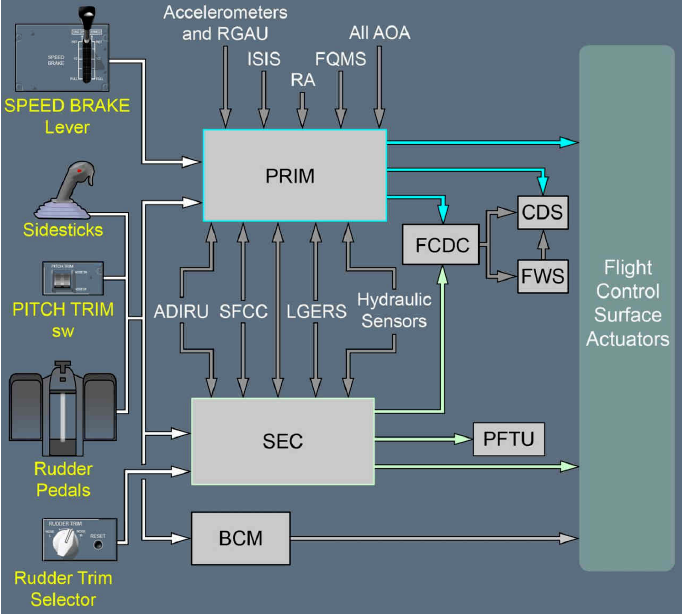
飞控计算机有6个,3个PRIM,3个SEC。正常情况下 PRIM 1 做master,其他接受指令并作动相应的操纵面。PRIM故障时可以依次接替作为master。SEC不能作为master。
以前看这种系统结构图很难理解,觉得信息很多找不到头绪。一方面是因为A320的图确实没这么形象。二是以前缺乏从控制论的高度出发整体看待结构,并能够先抓重点,有意识的忽略一些细节,再慢慢构建全局的能力。
看多了系统结构图就会发现,构架上都是相同的:计算机,输入设备,输出设备。计算机可能是一个,也可能是几个。输入设备有物理的操纵设备,也有很多传感器或者其他计算机数据。输出设备可能是作动器,也可能是其他计算机,显示设备等等。明确这个之后,看这些图就可以整体把握,不用一次关注所有细节了。
PRIM 功能比较多,能想到的飞控相关功能都包括,就是A320的ELEC, SEC, FAC的总和,但还有一些其他功能:
- 计算正常、备份、直接法则
- 控制飞控操纵面
- Load Alleviation Function (LAF)功能
- AP, FD, A/THR
- 包线保护
- 特征速度
- 其他功能:
- BTV
- ROW/ROP
- 反推第三条防线
PRIM 从 ADIRU, ISIS, RA, FQMS 等等一堆其他设备接收数据,用来完成上述功能。具体有哪些数据以及怎么接收就不赘述。而 SEC 接收的数据就远少于 PRIM,这样就可以避免相关设备故障带来的影响,但同时,也就降级为直接法则。
PEDAL FEEL AND TRIM UNIT (PFTU) 有两个电动马达(SEC3和SEC2分别控制一个),用来移动脚踏板。一是在人工飞行时用来方向舵配平,二是在AP接通时反馈方向舵配平指令到踏板。
Electro-Hydrostatic Actuators (EHA) 和 Electrical Backup Hydraulic Actuators (EBHA) 的A350飞控系统最引人注目的新设计。
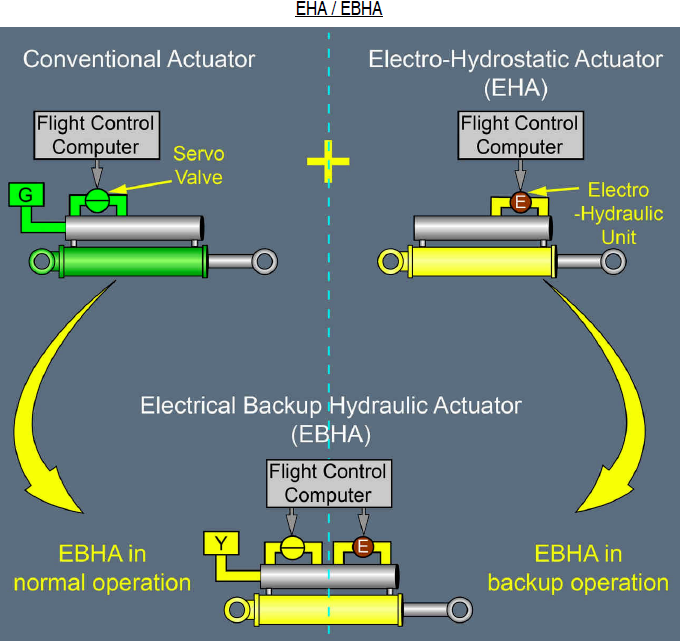
传统的作动筒是用活门控制液压来作动操纵面,而EHA是用电动液压泵来驱动自带的液压油箱从而作动操纵面。EHBA就是结合两者,其中的电动部分作为液压的备份,电动模式工作时,液压系统被隔离。只要液压系统有压力,EHA和EBHA自带的液压油箱是通过液压系统自动充压的。EHA和EHBA使用的都是230V AC。

Pitch 控制上,升降舵每侧都传统作动器主用,EHA为阻尼模式,当需要较大偏转率时,两个一起作动。
THS的自动配平,也就是起飞重心是FQMS提供的,根据FUEL & LOAD页面输入的零燃油重心和实际油量分布计算的,就是SD页面下方永久信息区域的那个重心。而PERF TAKEOFF页面的那个输入的起飞重心并不用来计算THS配平,只是用来交叉检查,如果和计算差得较大会触发警告。
Roll 控制使用2个副翼和3-7号扰流板。
外侧副翼在250kt以上不偏转。
扰流板在故障时会进入anti-extension mode:
- 如果之前是收上的,则保持收上
- 如果之前小于balance position,则保持之前位置
- 如果之前大于balance position,则收到 balance position
所谓 balance position,说白了就是如果故障在大于平衡位,就解除作动器的力,让它自由飘。这个位置随着速度和高度会变化。此时会触发ECAM F/CTL SPLRS PARTLY EXTENDED 信息。F/CTL PART(MOST) SPLRS FAULT 信息则是在失去故障扰流板位置时才会出现。
Yaw 控制上,两个传统作动器同时工作,EHA阻尼模式。如果一个传统作动器故障了,则EHA主用,另一个传统作动器阻尼模式。如果需要较大偏转率,则剩下的传统作动器与EHA一起工作。方向托配平就是用之前提到的 PFTU,配平权限是85%的偏转行程。在第一台发动机起动或者机组预位扰流板手柄时,扰流板自动预位到0°。这么说来启动后按压RUDDER TRIM RESET按钮只是为了在PFD上再显示一下配平状态以检查在0位。
如果一侧的某个扰流板故障了,另一侧对应的也被抑制。3-7号可用于滚转控制,滚转指令优先于扰流指令,比如一侧的滚转加扰流指令大于了最大偏转量,则另一侧的扰流指令会被相应减小。
每块扰流板的最大偏转量是不一样的。扰流板在超过VMO/MMO,或者自动紧急下降自动接通时会自动放出。扰流板偏转量并不是严格对应手柄位置的,而是还考虑了襟缝翼构型、载荷系数。扰流板在Alpha protection或者复飞时会自动收上。一旦自动收上,是不会再自动放回原位的,除非机组收上手柄超过5秒再放出。
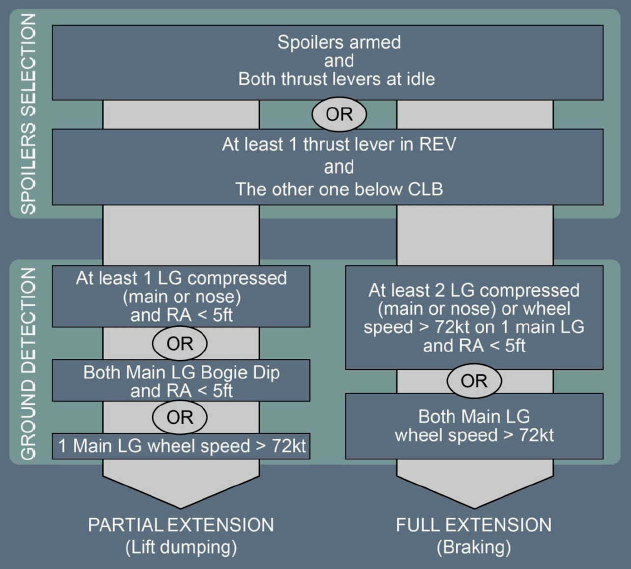
地面减速板的逻辑和A320是一样的,包括单轮接地部分展开。
着陆:
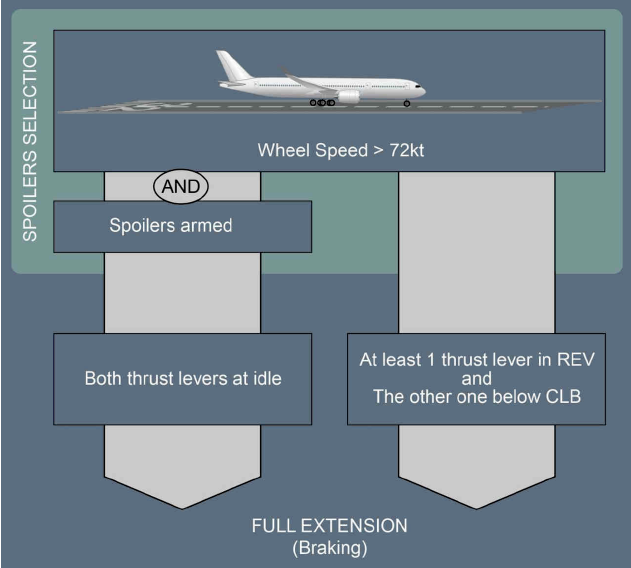
中断起飞时:
Adaptive Droop Hinge Function (ADHF) 是A350的新功能,PRIM能控制扰流板在襟翼放出时向下偏转,减小扰流板与襟翼之间的缝隙,以优化气动性能。
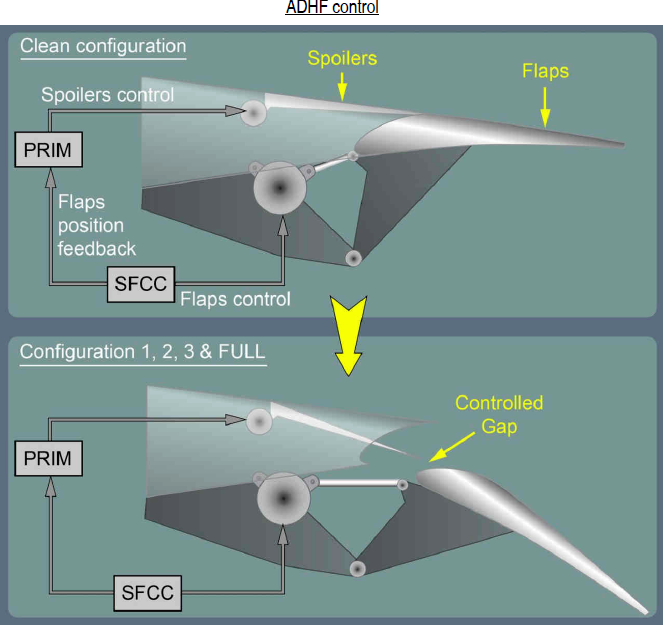
值得注意的是,当襟翼放出后扰流板故障时,有两种可能:在构型1-3的情况下,襟翼收上时会将扰流板推上去;在构型全时,则PRIM 禁止收襟翼,估计是因为偏转角度太大,推的时候会卡住吧。
DSC-27-10-20 Controls and Indicators

绿区是认证过的起飞范围,20%~42.4%。当俯仰配平超过起飞重心对应的俯仰值1.5°时,就会显示琥珀色。注意不是重心值,而是俯仰角度。超过绿区则显示红色。
PITCH TRIM sw在空中不可用,除非直接法则。方向舵配平旋钮和复位按钮在AP接通时不可用。
侧杆的控制和优先逻辑和A320一样。
DSC-27-10-30 Normal Law


正常法则的保护种类和A320一样:
- Load factor protection
- Pitch attitude protection
- Angle of attack protection
- High speed protection
- Bank angle protection
在A350的描述中,空客终于把A320里非常复杂的飞控法则描述精简了,去掉了 MODE 这个维度,全部改用 LAW。所以现在的 LAW 是一种综合了特定位置(空中或者地面)和等级(正常、备份、直接)情况下操纵情况的统称。对于理解和记忆来说,这是非常有利的。这是一种从工程师思维向用户思维的转变,这种转变还明显地体现在系统逻辑图上,向A320中那种一堆与、非、或门的逻辑图不复存在,全都改成说人话的描述或者针对不同情况下的简图。那种完整的逻辑图确实可以在一张图上表现出所有的系统逻辑,但对于用户来说,看这种图就像是走一个很多入口和出口的迷宫,要想知道什么原因导致什么什么结果,只有慢慢地小心翼翼地连线。这种图便于查询,但非常不便于理解和记忆。
正常法则下,PITCH CONTROL 有3种:Rotation Law, Flight Law, Flare + Derotation Law。LATERAL CONTROL有2种:Ground Law, Flight Law。
PITCH CONTROL:
这里说一下对A350的俯仰在地面叫做Rotation Law,而不是Ground Law的个人理解。
在A320中,俯仰和横侧在地面都叫Ground Mode,其实和直接法则差不多。关于Mode的问题前面说过了,这里不涉及。而A350中,俯仰控制在地面是 pitch rate demand的,并不仅仅类似于直接法则,好处是可以尽量提供一个在任何重量、起飞重心和构型下一致的抬头滚转率,避免擦机尾保护。但机组可以超控擦机尾保护,这个没啥具体解释,估计就是带杆到底还是会擦吧。
Rotation Law depends on:
- Pitch rate
- Tail clearance
- Sidestick position
Flight Law和A320的差不多,就是 load factor demand。正常情况下,离地后5秒转换为飞行法则,但在迎角保护或者仰角保护情况时,转换时间降低到1秒。
Flare + Derotation Law 就是直接法则带一些俯仰反馈的阻尼(应该是偏转率越大阻尼也越大以避免过量操作)。
LATERAL CONTROL:
Lateral Control 的Ground Law是带yaw damping的 full authority control law,个人理解就是带一点反馈阻尼的直接法则。
与A320有一些细节上的不同,或者说优化:
一是在小于2°的小偏转情况下,侧杆回中后副翼会保持这个偏转。
二是在起飞单发情况下,工作发一侧的副翼和3号扰流板会偏转以增大阻力,减少偏转力矩。但这个偏转是有条件的:
- 飞机在地面
- 速度大于60kt
- 踏板输入超过2/3

这个图画的不是很好,尤其是下半部分的象限图,会给人以两侧都偏转的错觉。其实只有工作发一侧会边,那个象限图只能说明两侧可偏的程度一样。
三是单发时会自动蹬舵帮助保持飞机状态。条件是速度大于100kt,且朝失效发的横侧加速度超过一定阈值。需要注意的是,这个自动蹬舵的量并不会抵消侧滑,这是让机组仍然保持对发动机失效的意识。而且机组必须主动蹬舵来修正侧滑,否则一开始看起来侧滑很小貌似不用蹬,随着起飞后速度增加,飞机的侧滑会越来越大,飞机性能会大幅降低,上升率变得很小,噪音很大。
四是当踏板失效或者卡阻的时候,差动刹车还可以控制方向舵:
- 飞机在地面
- AP没接通
- 速度大于50kt
当差动刹车超过50%时,PRIM会控制方向舵偏转以增加偏转量。
横侧的 Flight Law 是roll rate和sideslip的demand law。和A320一样,也有各种保护、协调转弯、荷兰滚阻尼。
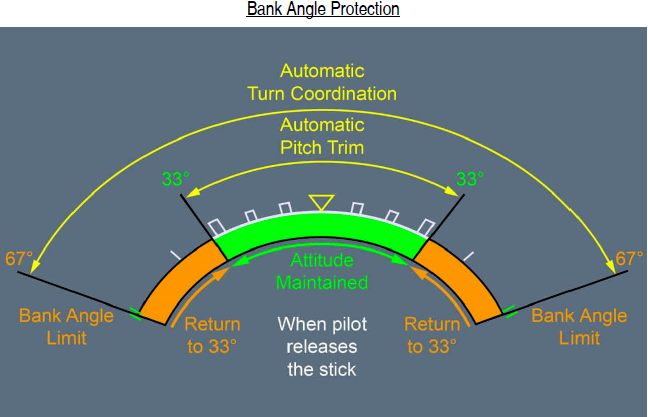
最大坡度:
- 67°,光结构型
- 60°,高升力构型
- 45°,向下俯角保护生效
- 45°,高度保护生效,松杆坡度回0
- 受载荷系数限制(大于45°),迎角保护生效
在100ft以下,就算有sideslip demand,飞机也会尽量保持机翼水平,以辅助在侧风落地de-crab阶段的滚转控制。
LOAD ALLEVIATION FUNCTION ( ) 是正常法则下的另一种保护,通过使用飞控操纵面(副翼、扰流板、襟翼)的偏转来减少某些情况下机翼的载荷和疲劳。包括 Maneuver Load Alleviation (MLA), Gust Load Alleviation (GLA), Differential Flaps Setting (DFS)。LAF只是DFS其中一个功能。
简单来说,MLA就是在大机动载荷情况下,减小副翼或扰流板的向上或向下偏转量,以卸除部分载荷;GLA是在颠簸情况下减小副翼的向上偏转量,以卸除部分载荷;DFS是在大重量下增加内侧襟翼偏转量,以减小机翼弯曲力矩。
MLA和GLA在200kt以才工作,且滚转指令优先。MLA在构型全时被抑制。DFS在MTOW-30T 且光结构型情况下工作。具体的使用条件和限制翻书吧,记不住。
个人总结:
所谓法则,就是操纵设备和飞控操纵面(副翼、扰流板、升降舵、THS等)之间的对应关系。包括正常范围的对应关系,以及不正常情况下的对应关系,也就是各种保护。最基本的对应就是操纵设备与飞控面之间一一对应,换句话说,杆动多少,操纵面就偏多少,也就是直接法则。这种对应方式在不同的重量、重心、速度下,同样的杆量飞机反应会有很大不同,比如小速度下反应就小,大速度下反应很大。这对机组操纵能力要求会很高,不是现代飞机的设计理念。由于设备数量和复杂程序的急剧增加,现代飞机设计要求尽量合理的降低机组的直接操纵工作负荷,从而分出精力来监控各种设备,管理整个飞机正常工作。从一个操纵者转为一个管理者。所以在操纵这个方面,不能再像以前一样,需要机组在不同情况下思考不同的操纵方法和操纵量。这就催生了不同程度上的对操纵量的简化和统一。
最简单的就是在直接法则上加一些反馈阻尼,杆量越大,阻力越大,一定程度上避免过量操作。更高级的方式是将杆和飞控面的一一对应关系变成 demand 对应关系,杆量对应的不是飞控操纵面的偏转量,而是固定的飞机反应量。比如 PITCH CONTROL 在地面是pitch rate demand的,可以尽量提供一个在任何重量、起飞重心和构型下一致的抬头滚转率,避免擦机尾保护。在空中是Load Factor Demand,不管在低速/高速,小重量/大重量的情况下,相同的带杆量对应的是给飞机翼面同样的载荷,而不是偏转量。对飞行员来说,就不需要过多考虑过量操纵和结构损坏了。
在正常情况范围以外还可以加入各种保护,以限制在高速、大迎角、大坡度、大俯仰角、大载荷等情况下的飞控面继续偏转,避免进入复杂状态。
而同时,仍然需要保留最基本的直接法则,应为上述各种高级的法则和保护都需要飞控计算机来计算和控制,也需要作动器来作动。如果计算机、传感器、飞控操纵面(作动器)、或者液压故障等等导致高级法则不能工作,机组仍然需要使用直接法则来控制飞机。
DSC-27-10-40 Reconfiguration Control Laws
与A320一样,单一故障不会导致法则降级,多个故障才会,而具体降级情况要根据故障严重程序来定。
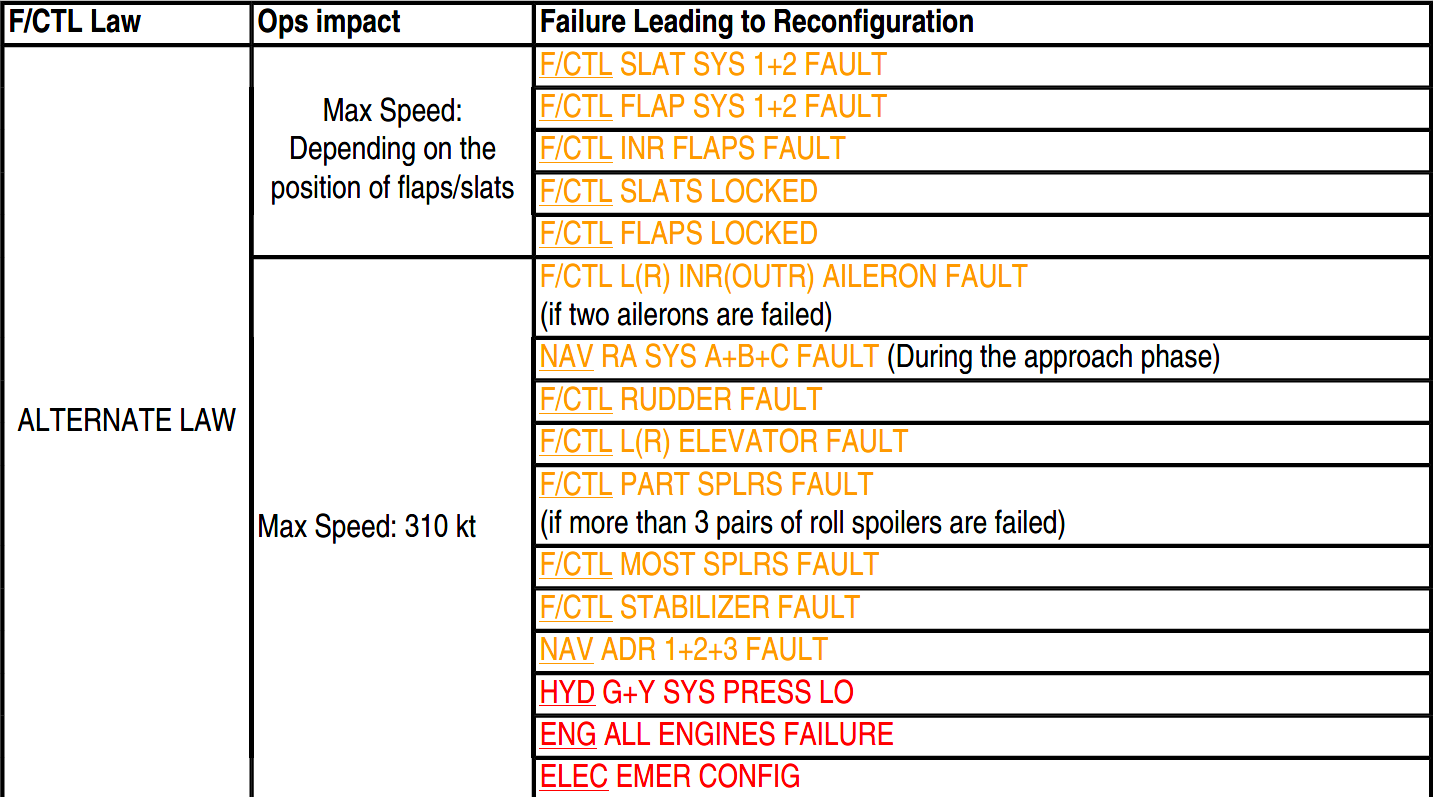
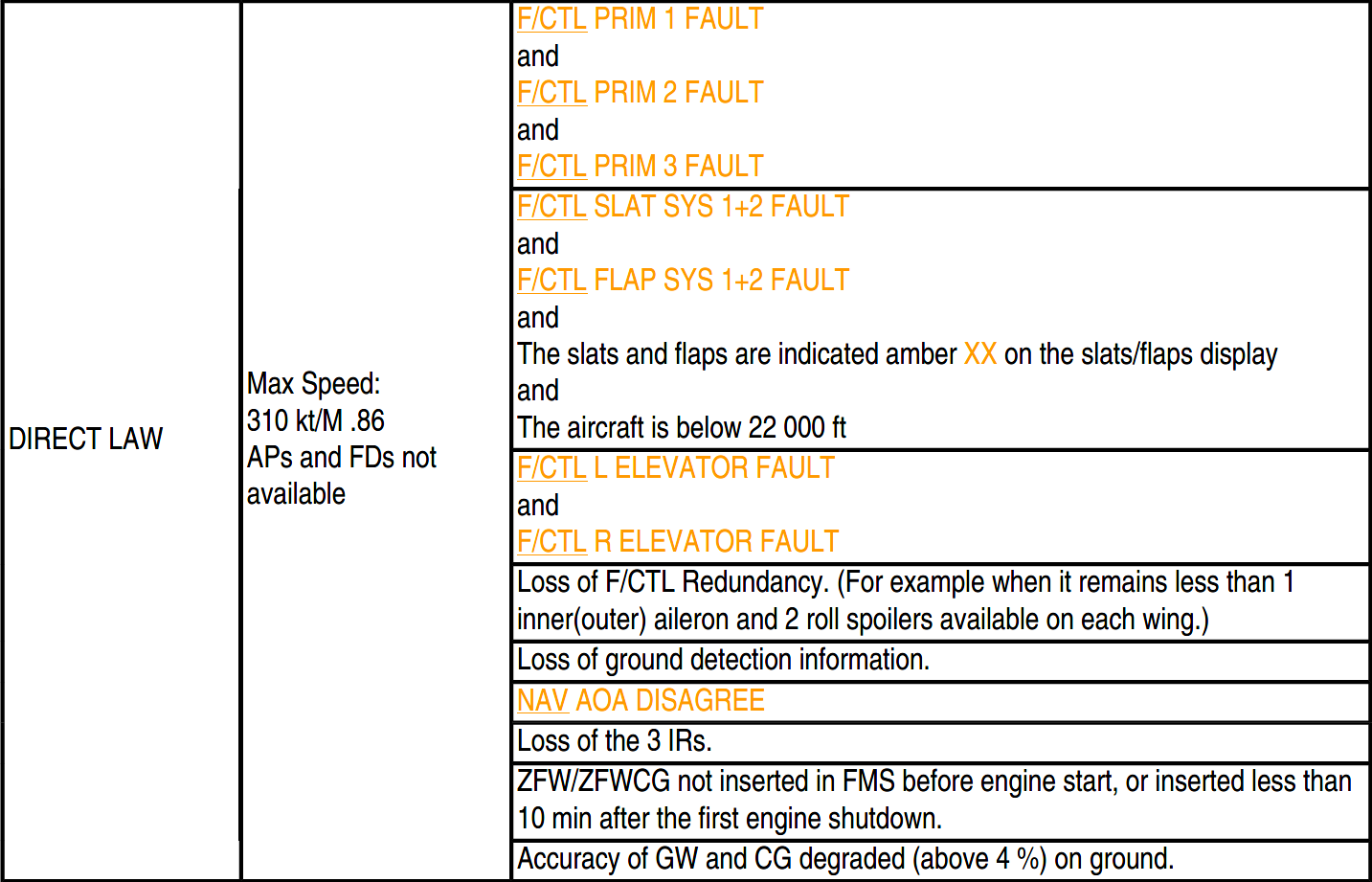
可以看出,导致降级的故障大部分是计算机、传感器、飞控操纵面(作动器)、液压四个类型。飞控面和液压故障一般降级为备份法则,而计算机和传感器的全部失效,或者多套飞控面失效才会导致直接法则。
常见需要记住的是:
- 3部ADR失效,备份法则
- 双液压,备份法则
- 应急电气构型,备份法则
- 3部PRIM失效,直接法则
- 3部IR失效,直接法则
备份法则与正常法则在操纵设备和飞控操纵面上是一样的,都是demand的关系,只是根据故障情况不同,失去部分保护。超速和失速警告仍在可用。速度限制310tk以避免超速。

直接法则就是最基本的操纵设备和飞控操纵面偏转量一一对应,失去所有保护。超速和失速警告仍在可用。速度限制310tk以避免超速,马赫数限制M.86以保持俯仰稳定性。yaw control提供有限的荷兰滚阻尼和转弯协调。
ABNORMAL ATTITUDE LAW 就是解除所有限制的直接法则,在飞机远超出正常包线的情况下,提供最大操纵权限给飞行员以回到正常状态。就像是EVA解除拘束锁,死神卍解,虽然没什么限制了,但搞不好就走远连自己都控制不了了。
在失去所有PRIM和SEC的极端情况下,还有BACKUP CONTROL可以控制内侧副翼、升降舵、方向舵来提供操纵。
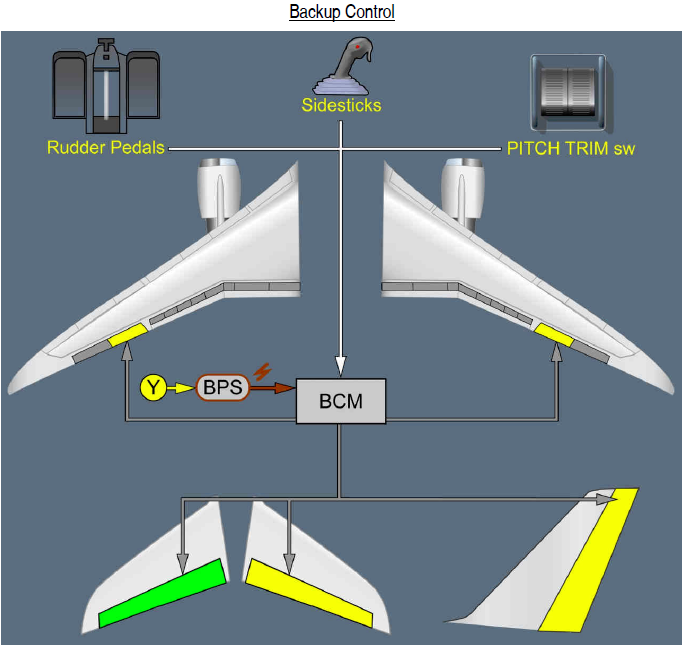
从上图和前面的飞控计算机概览图可以看出,Backup Control Module (BCM)只与最基本的侧杆、方向舵踏板、俯仰配平开关链接,没有其他各种数据来源,所以也就没有控制稳定性。
黄液压驱动BPS给BCM供电,也就是说BCM是独立于正常电气网络的,这算是一种裕度吧。
DSC-27-20 Slats/Flaps
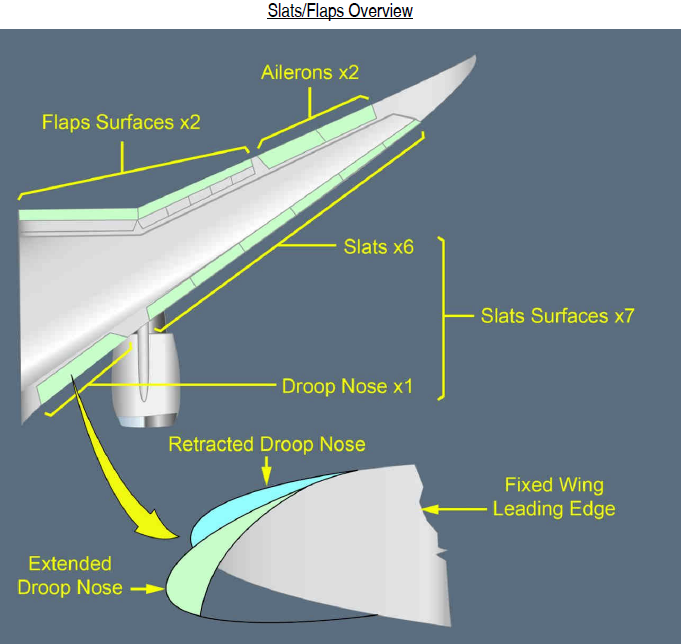
DSC-27-20-10 System Description

POB: Power-Off Brake
SLATS SYS和FLAP SYS都是SFCC的一部分。
在地面,SLATS SYS 1 的电动马达只在液压系统增压的时候才能工作,以避免地面人员在飞机附近时误操作襟翼造成伤害。
ACTIVE DIFFERENTIAL GEARBOX (ADGB) 可以用单独的电动马达来作动外侧襟翼。一般来说WTB锁定之后在空中是无法解锁的,但当用于DFS时,WTB锁定外侧襟翼,这种情况是可以解锁的。每个襟缝翼SYS控制相应的POB。FLAP CTL 1&2都可以控制两个ADGB的POB。
ADGB 与内外侧襟翼之间的传输轴相连,可以作动外侧襟翼。ADGB有两个用处:一是实现DFS;二是在双液压失效时,仍然可以作动外侧襟翼。虽然如前面所说,FLAP CTL 1&2都可以控制两个ADGB的POB(在上图中的手绘连线),但只有FLAP CTL 2能控制电动马达。所以如果FLAP CTL 2 故障,不能实现只移动外侧襟翼,但可以通过FLAP CTL 1 控制POB来实现只移动内侧襟翼或者同步移动内外侧襟翼。
DFS可以在不移动内侧襟翼的情况下独立控制外侧襟翼,用来实现 FLAP CRUISE DEPLOYMENT FUNCTION (FCDF)
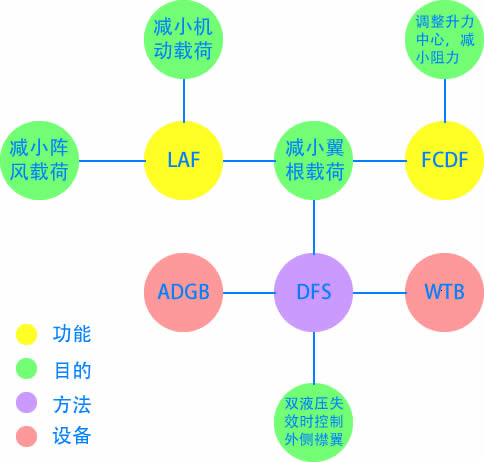
实现 DFS,可以靠 ADGB 和 WTB。 ADGB 可以主动驱动外侧襟翼,WTB 可以在 FLAP CTL 正常驱动内外侧襟翼时单独锁定外侧襟翼,以达到只移动内侧襟翼的效果。个人猜测 WTB 同时连接内外侧襟翼两根传动轴,可以单独锁其中一根。
DSC-27-20-20 Configurations
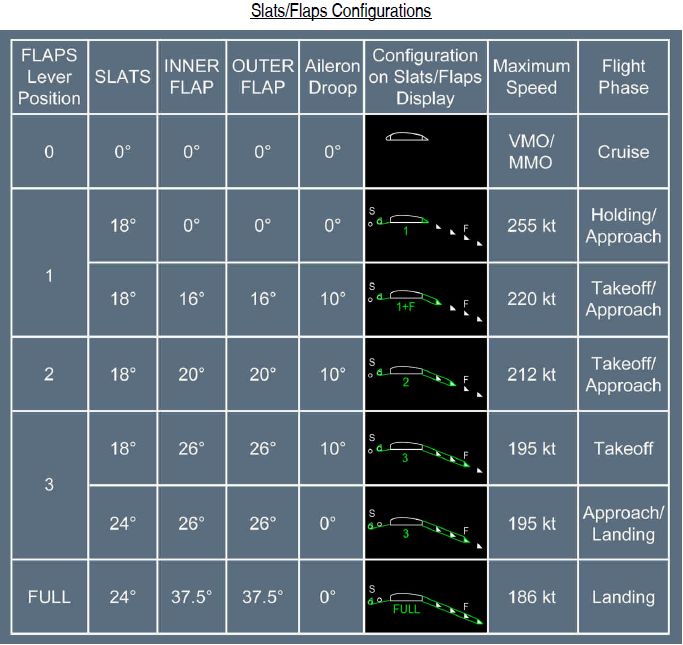
上图对VFE有个印象就可以了。
A350在襟缝翼的控制上增加了很多保护措施,防止在不该放出/收回的情况下误操作:
一是当襟缝翼卡阻的时候,PFD上的VFE可能会比标牌上的VFE(上图中的速度)有所增加,这是为了至少保持一个最小的margin:

二是 ARS/AES 和FLRS功能。


这两个很像,主要区别在于,FLRS只会在当前手柄位置和小一档位置之间收放,实际的 VFE 对应实际襟缝翼构型,但 PFD 显示的 VFE 对应手柄位置。而 ARS/AES 只作用在构型1与 1+F 之间,手柄位置是不变的,实际和显示的 VFE 对应的都是实际构型。
超速警告触发是在VFE+4kt,所以在 VFE+2.5kt收一档保证不触发。此时在PFD的Slat/Flap SD上出现“F RELIEF”信息。
三是 SLAT ALPHA/SPEED LOCK FUNCTION 可以在高迎角(大于10.6°)时,并且/或者在非常低速(小于140kt)情况下禁止缝翼收到零位。A. LOCK信息出现在PFD的Slat/Flap SD上。PFD上的VLS是根据实际位置计算的。
四是如果在巡航时(空速大于265kt,高度高于22000ft),将手柄放到1位, SLATS/FLAPS CRUISE BAULK FUNCTION 会禁止襟缝翼伸出。但如果继续放超过1位,就不会保护了。//EOD
五是DFS。参见上文。
DSC-27-20-30 Controls and Indicators
A350的起落架手柄增加了一个 OVERRIDE MECHANISM 功能,在手柄卡阻的时候能够不用提起来就暴力拉下一档,但据说需要很暴力。