1 前言
新简令已经上机一段时间了,从目前的反馈来看,对威胁识别和缓解模块的使用还有一些不熟悉的地方,所以今天再来做一个讲解。因为涉及“威胁与差错管理”TEM,我也不是很专业,只能说尽量以有限的知识和能力来跟大家一起学习一下。如果中间有说的不清楚或者不准确的地方,希望各位补充和纠正。
2 TEM 模型及其优点
Threats and Error Management,威胁与差错管理。这其实不是一个全新的概念,而是从人的因素、CRM 等等关于人的行为能力、差错等概念和知识上逐步发展而来的。从意识到“是人就会犯错”这一个基本事实开始,对于到底什么会导致犯错、如何尽量避免犯错,以及犯错后如何尽快纠正这些问题,行业内就一直在进行各种研究。一些我们熟悉的模型和概念都逐渐被提出,比如 SHELL 、人机环等等。 TEM 其实就是到目前为止最新的一个模型,是集体行业经验的发展而来的产物。
为什么 TEM 比以往的其他模型更先进呢,因为它把“犯错”这件事分解得更细了。就像几乎所有科学领域一样,这基本上是深入研究的必经之路。分子拆成原子,原子拆成质子和中子,等等等等。
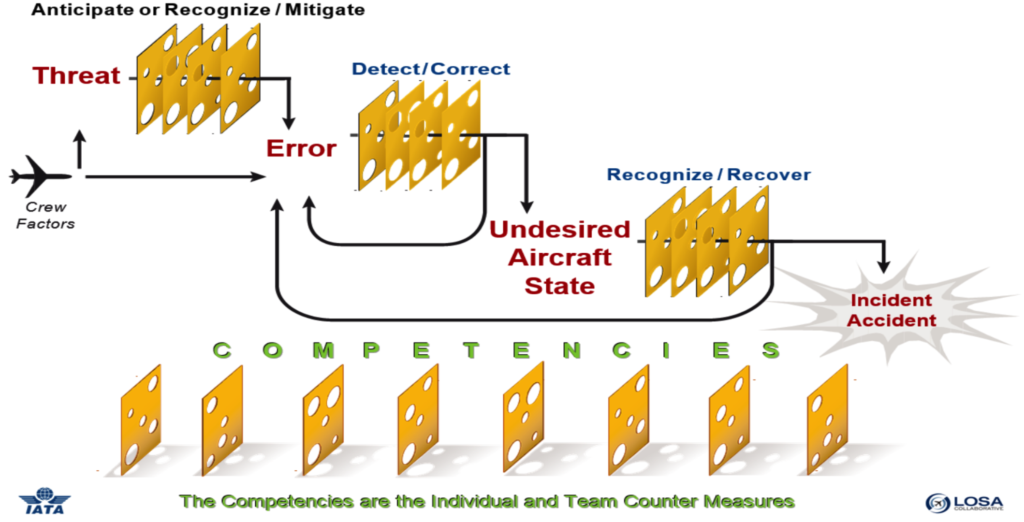
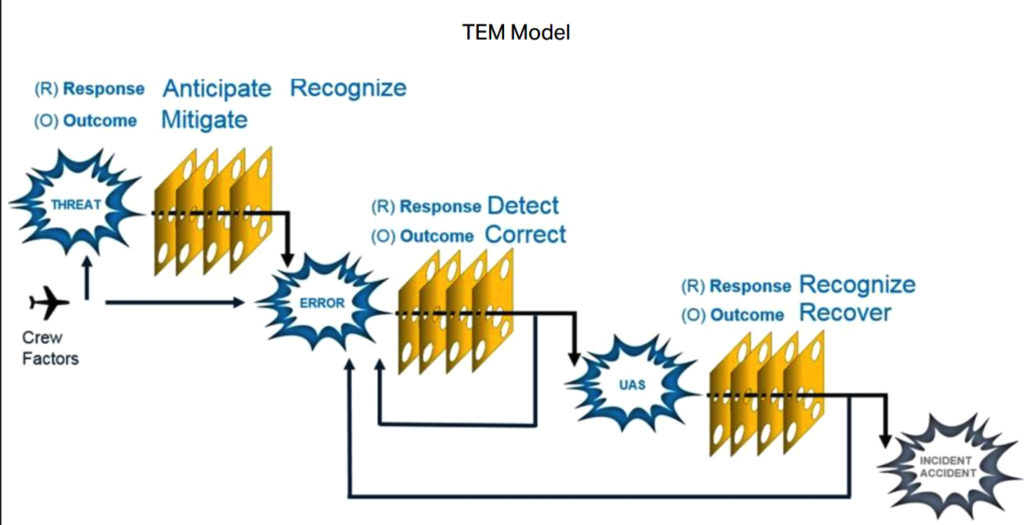
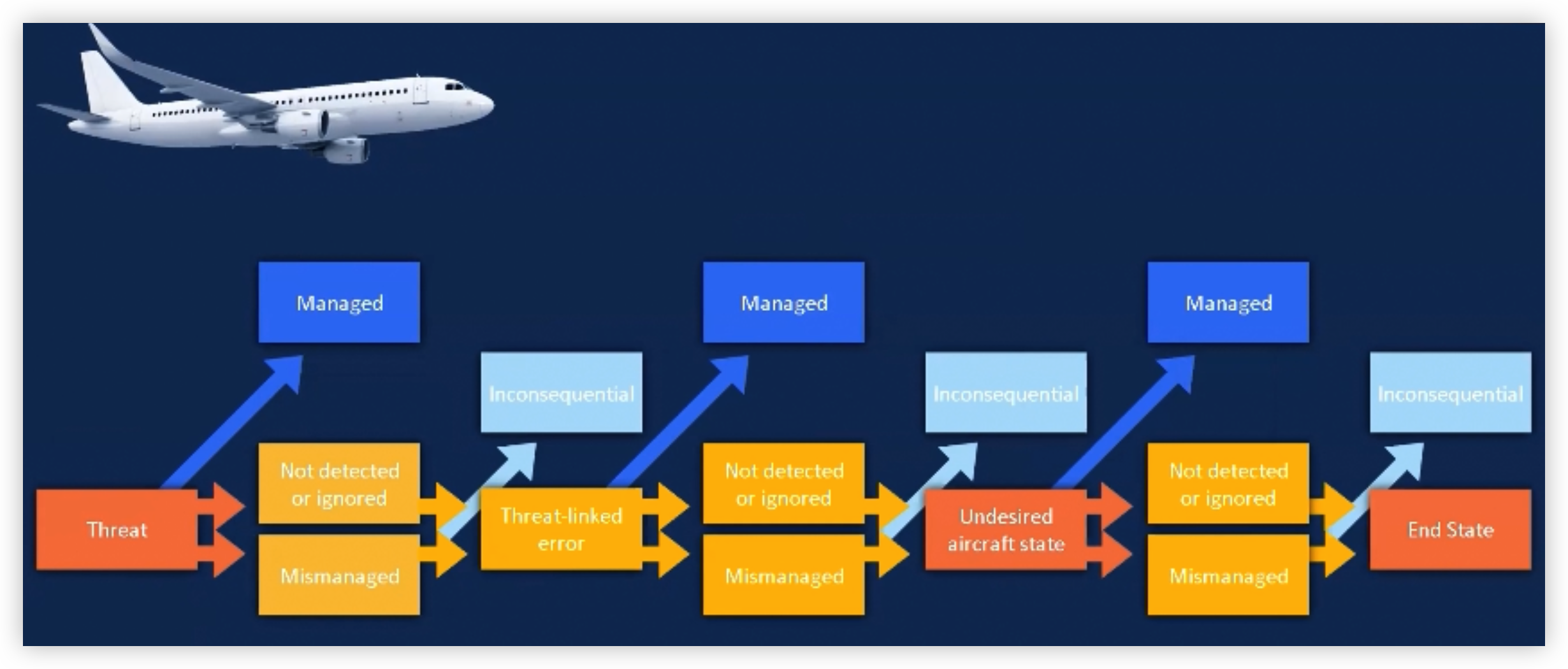
TEM 把犯错的过程(形成不可逆转的结果之前)分成了威胁、差错、非预期航空器状态三个层级,并对层级的区分有较为明确的定义。
- 威胁被定义为超出飞行机组影响范围发生的,增加运行复杂性,因而为保持安全裕度必须加以管理的事件或差错。
- 差错被定义为导致无意的偏离组织或运行预期的飞行机组的作为或者不作为。
- 非期望的航空器状态的特征是偏离运行期间通常经历的参数(例如航空器位置或速度偏差、飞行操 纵装置的不当使用,或者不正确的系统配置),与安全裕度降低有关。
打个比方,你走在路上,前面有个小坑,这就是威胁。要是没看见,对着就走过去,这就是差错。要是最后踩进去了,那就是非预期的航空器状态。如果摔倒了,那就是事故征候,如果受伤了或者摔死了,那就是事故了。
需要特别注意的是,威胁——差错——非预期航空器状态之间并不是一一对应和绝对连接的,大部分的时候,前者并不会引发什么后果,甚至 LOSA 数据表明 90% 的非预期航空器状态都没有导致安全性大幅下降。
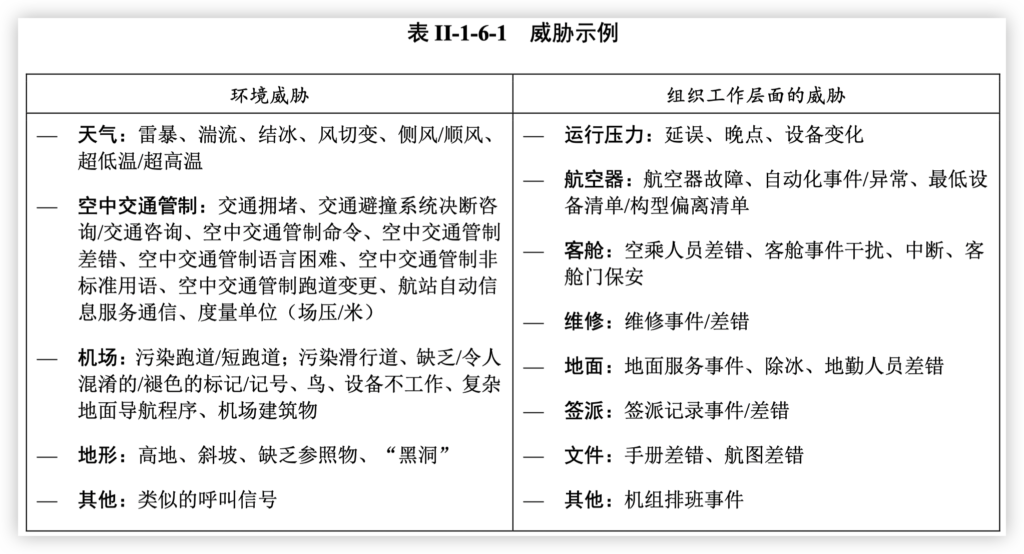
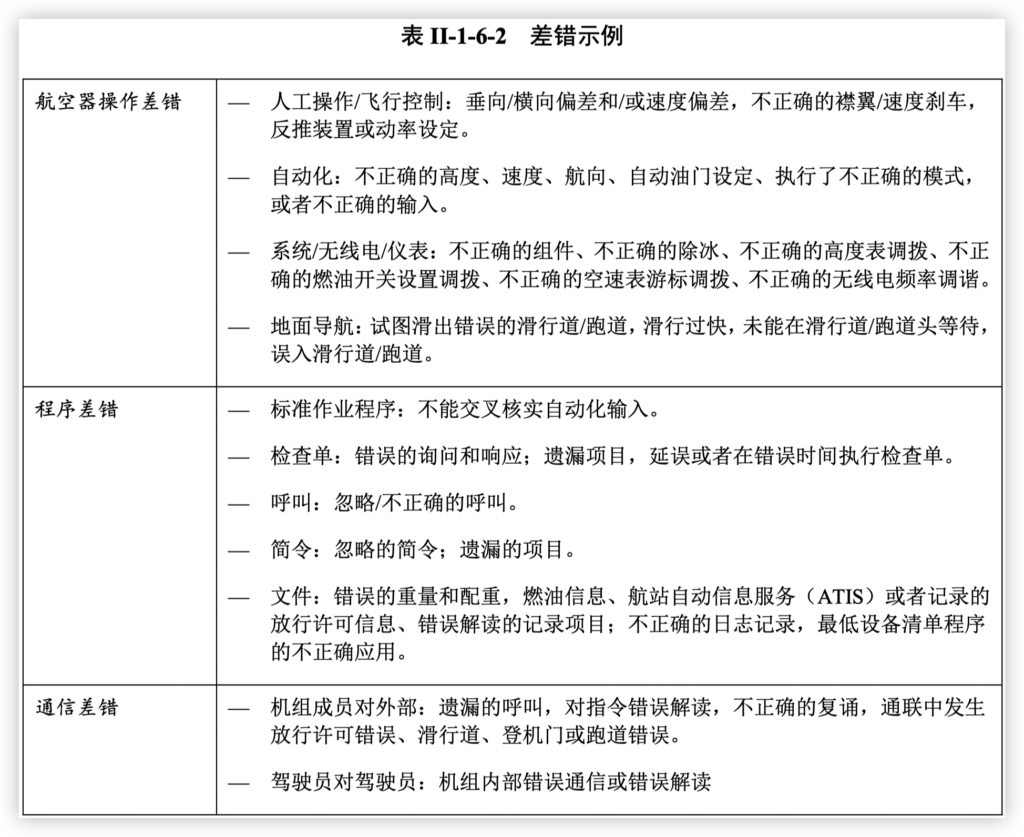
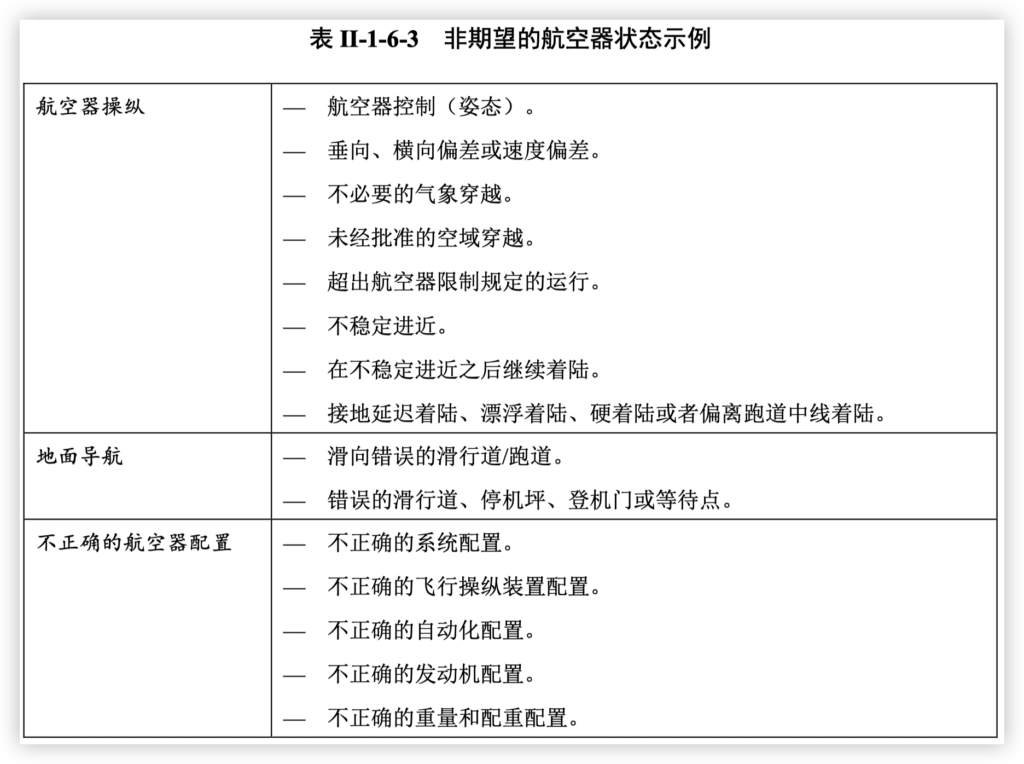
以下是 ICAO DOC 9868《培训》这个文件里对每个层级的示例:
分得更细之后,这个模型就能更好地描述犯错的步骤和具体原因,帮助人们立即犯错的具体过程,也就可以针对每一个过程或者层级制定对策,从而形成多重的缓解措施,这就是所谓“管理威胁、差错和非预期航空器状态”。
与之前的 CRM 模型相比, TEM 模型的实用性大大增强,所以被被广泛用安全、运行、培训等各个方面:
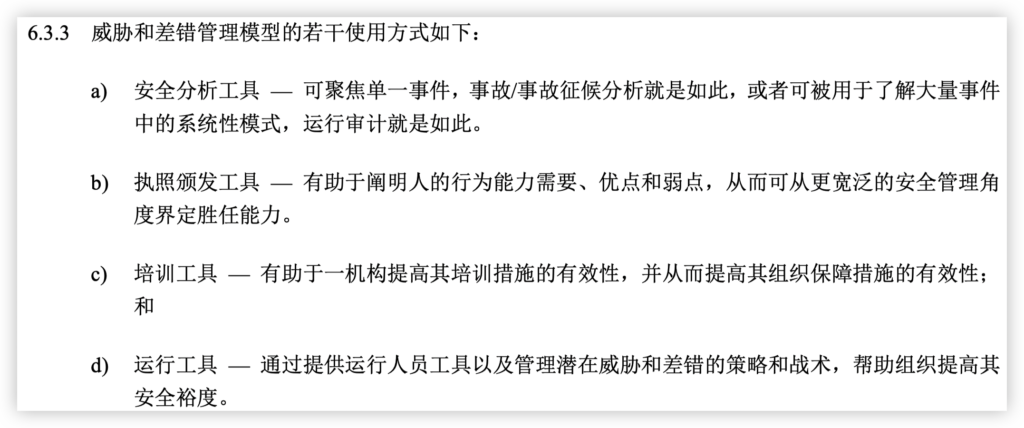
对我们一线飞行员来说,需要关心的主要是运行和培训方面。新简令就是 TEM 在运行工具上的体现。
3 TEM 模型在新简令中的应用
FCTM 上对简令的讲解已经很详细了,之前的培训课件中也做了摘要,这里就只说一下重点,然后聊一聊那个威胁表格的使用。
空客强调运行简令是 TEM 不可或缺的组成部分。简令的首要目的应该着眼于威胁的识别和缓解措施的协同,第二个目的是识别偏离常规的运行。说白了简令主要是用来说今天飞行有什么特别的,而那些一尘不变的东西主要依靠 SOP 的严格执行,以及检查单的交叉检查。PF 和 PM 交替执行简令,在结束之后,机组应该对上述威胁、缓解措施和偏离常规的运行获得一致的思维模型。
关于威胁表格,包含的内容已经非常丰富了,可以覆盖大部分可能出现的威胁类型,所以是一个很好的“辅助记忆工具”。
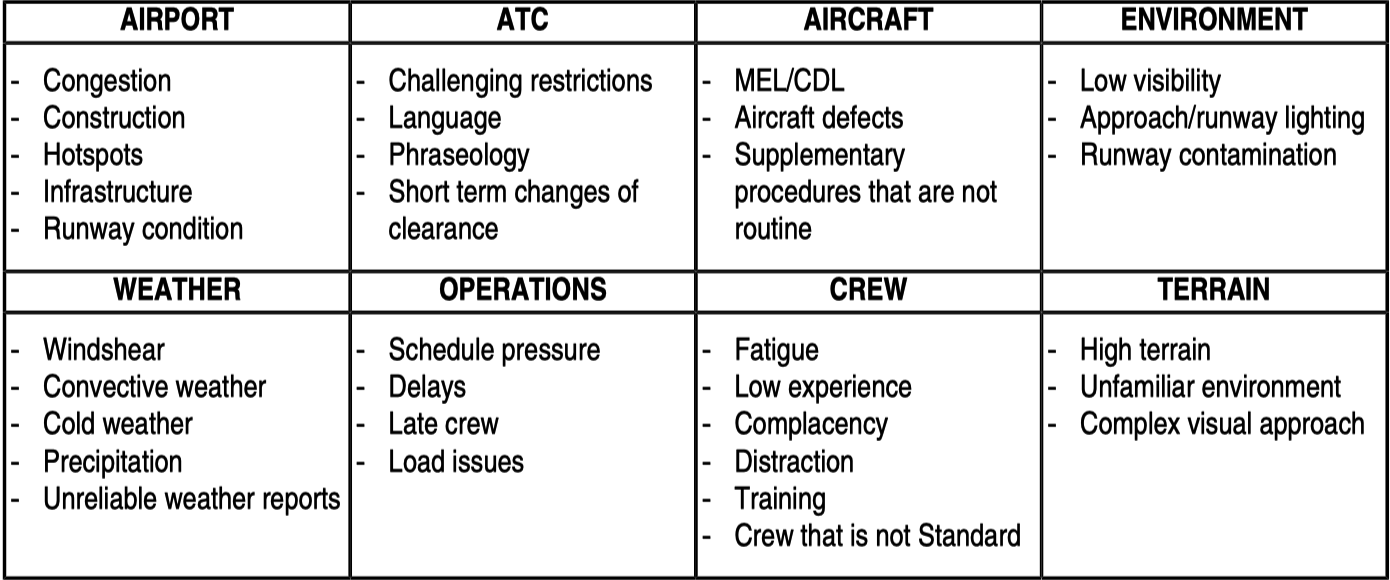
但一定要注意,空客反复强调,这只是一个辅助的“记忆工具”,不能作为检查单类型工具来使用。因为可能发生的威胁数量是没有限制的。使用检查单类型的工具去识别威胁会对开放态度和跳出框架的思维形成障碍。比如 GNSS 干扰就不在这个表格里,我们飞特拉维夫做巡航简令和进近简令的时候就不能只照着表格来。
鉴于威胁表格的使用要求,新简令需要 PF 和 PM 交替进行,用时可能稍长的问题,个人建议如下:
- 严格执行下降准备 SOP,尤其是对计划的检查和着陆性能的评估
- 留足够的时间来做简令,尽量确保期间不出现下降、换频等其他操作,避免错忘漏。这也是简令第一步“设定一个没有干扰的环境”所要求的。
- 做简令之前,PF 和 PM 要先仔细思考可能存在的威胁,然后用表格来查漏补缺,确定好威胁之后再开始做简令。不要等简令做到“威胁”这一步再临时对照表格来找威胁,这样就变成检查单类型的工具了,无法跳出框架。
举个例子:
- 特拉维夫,30 RNP 进近,晴天,但风比较乱,可能存在顺风。为了进来确保处于没有干扰的环境,在进入尼科西亚,面临多方通讯、下降高度、可能的跑道更改之前,机组按照 SOP 完成了进近准备,主计划 30 RNP,SEC 1 做的30号盲降。同时按照最大可能的顺风计算了着陆性能,没有问题。
- PF (副驾驶)告知 PM (机长)准备做简令,请先各自思考可能的威胁。PM 识别出了 RNP 进近及 GNSS 干扰问题、风变化较大及风切变的可能性、低空接管的需求,然后在对照威胁表格时,又增加了之前没想到的滑行道坡度问题。PF 则补充了自己经验少和五边操纵的问题。
- PM 开始执行简令,完成 2a 和 2b 项之后,两人交流了上述识别出的威胁,复习了 RNP 进近导航降级的程序、风切变复飞的动作和喊话、低空操作的注意事项,明确接管喊话和动作,注意滑行速度控制。
4 TEM 与 CBTA, EBT 的关系
TEM 与 EBT 和 CBTA 已经完全结合了。因为我们已经要进入 EBT,这里多说两句我自己对 TEM, EBT, CBTA 关系的理解。当然,由于我也还在学习这些内容,不敢保证正确,只是抛砖引玉。CBTA: Competency-based training and assessment
EBT: Evidence-Based Training
CBTA 就是要从传统的面向一个个科目,变成面向训练胜任力。目的不是要熟练应对某个具体的科目,而是要通过科目的训练来提升胜任力,以应对“威胁、差错和非预期航空器状态”。
EBT 是指训练使用的科目和场景是基于实证的(evidence)。所谓实证,就是应该训练什么科目和场景,多长时间训练一次,不是我们拍脑袋决定的,而是通过飞行数据分析(如 QAR)、飞行观察(如航线运行安全审计 LOSA)以及航空安全报告(如QSMS报告)等数据体现出来的。比如以前经常出现的那种复杂科目叠加,数据表明这几乎是不可能出现的,那就没有必要去训练,又比如某中故障出现频率较低,风险也不大,那就三年训练一次,而不是一年一次。
需要注意的是,这些概念并不是一开始就严格定义的,都是在发展的过程中逐步确立其内涵和外延的,也经历过改变和融合。CBTA 是 ICAO 定义的,EBT 是 EASA 定义的,经过这么多年的演化,其实两者已经融合了,具体的内容就是
“基于实证数据,通过合理设置训练主题、科目和场景,来提高机组胜任力,以应对威胁、差错和非预期航空器状态”
所以 CBTA 和 EBT 是从不同的视角看待同样的培训。
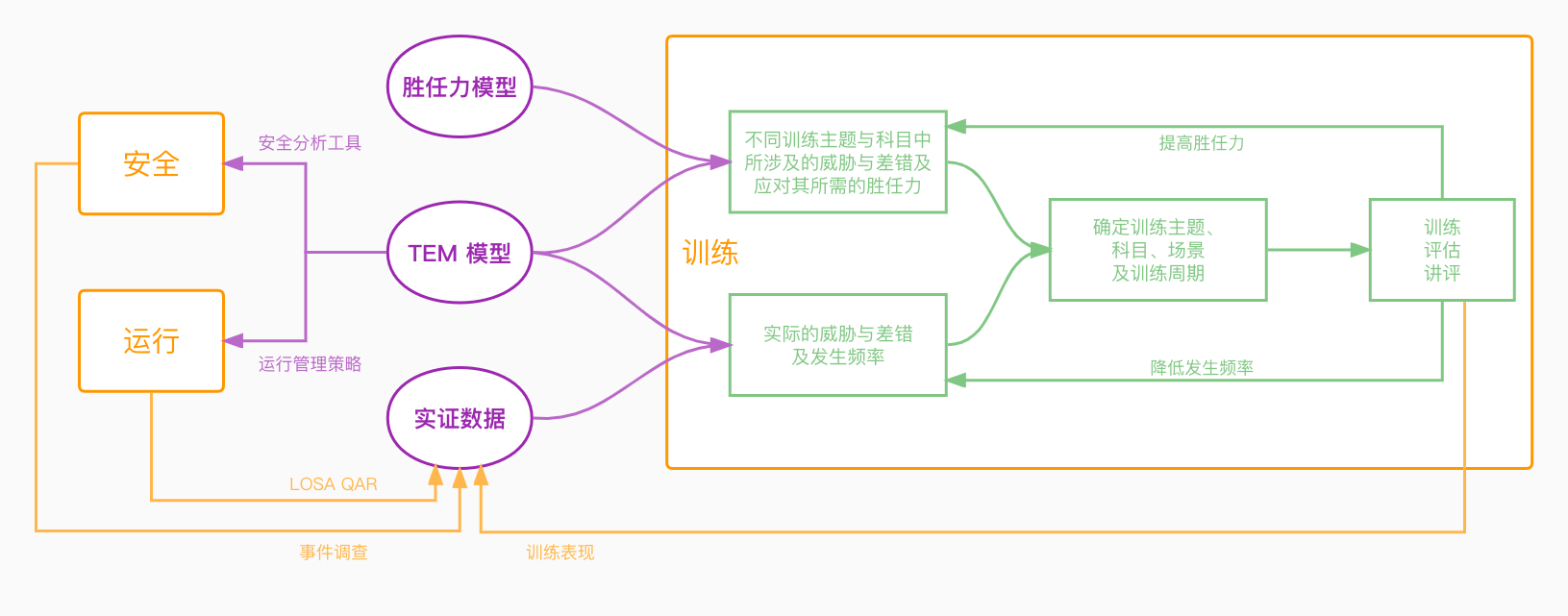
而 TEM 也是贯穿培训其中的,因为实证数据显示出的“确定的”威胁、差错和非预期航空器状态是培训的出发点,而管理“不确定的”威胁、差错和非预期航空器状态是培训的最终目的。